edd9000
pfm Member
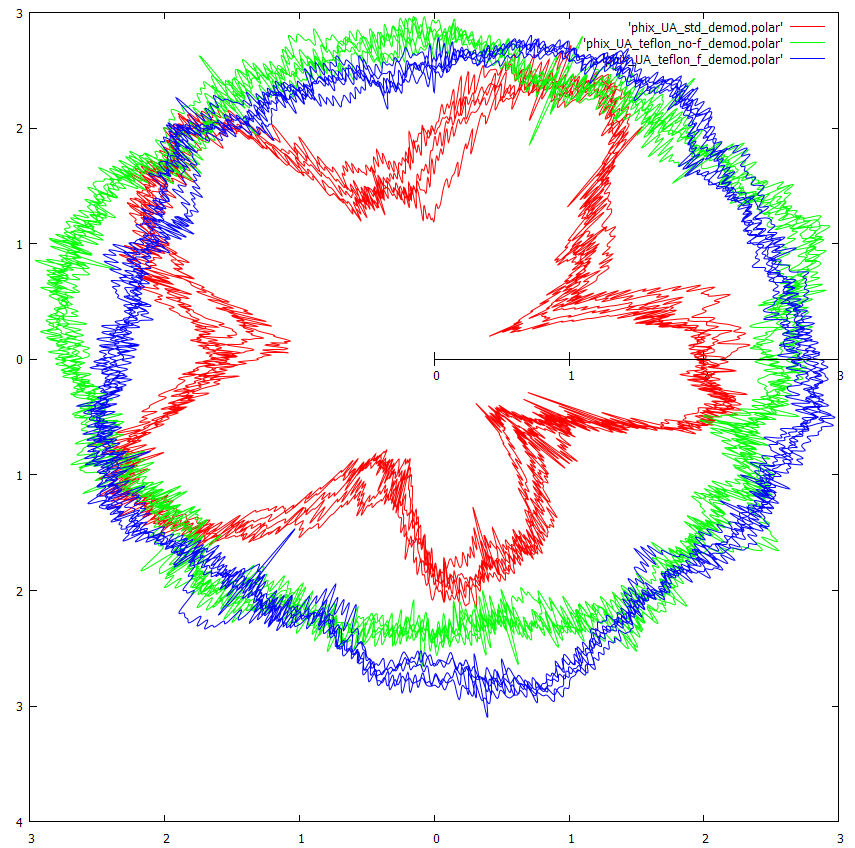
Here the change is not so big indeed. The 2.72Hz is there as this is probably idler surface/eccentricity. Teflon washer seemingly increased the errors in the 10-20Hz range but the comaprison is not fair as the deck is in two different conditions: with and without the console. The motor 25Hz is very clear...strange as the phases are aligned under load to less than 1VAC.
I don't think the noise between 10-20 has increased. The Teflon washer has dropped the overall noise floor making the peaks more distinct, but they remain at almost exactly the same level, around -36db.

") ), but the appearance of 12.5Hz peak shows my calculations should be divided by two (the motor rpm i guess). I've also found 12.5Hz mentioned in the 930 context in the German analog forum.
), but the appearance of 12.5Hz peak shows my calculations should be divided by two (the motor rpm i guess). I've also found 12.5Hz mentioned in the 930 context in the German analog forum.
